Ziele gemäß Rahmenlehrplan
Cyber-physische Systemeergänzen
Die Schülerinnen und Schüler verfügen über die Kompetenz, die physische Welt und IT-Systeme funktional zu einem cyber-physischen System zusammenzuführen.
-
Die Schülerinnen und Schüler analysieren ein cyber-physisches System bezüglich eines Kundenauftrags zur Ergänzung und Inbetriebnahme weiterer Komponenten.
-
Sie informieren sich über den Datenfluss an der Schnittstelle zwischen physischer Welt und IT-System sowie über die Kommunikation in einem bestehenden Netzwerk. Sie verschaffen sich einen Überblick über die Energie-, Stoff- und Informationsflüsse aller am System beteiligten Geräte und Betriebsmittel.
-
Die Schülerinnen und Schüler planen die Umsetzung des Kundenwunsches, indem sie Kriterien für die Auswahl von Energieversorgung, Hardware und Software (Bibliotheken, Protokolle) aufstellen. Dazu nutzen sie Unterlagen der technischen Kommunikation und passen diese an.
-
Sie führen Komponenten mit dem cyber-physischen System funktional zusammen.
-
Sie prüfen systematisch die Funktion, messen physikalische Betriebswerte, validieren den Energiebedarf und protokollieren die Ergebnisse.
-
Die Schülerinnen und Schüler reflektieren den Arbeitsprozess hinsichtlich möglicher Optimierungen und diskutieren das Ergebnis in Bezug auf Betriebssicherheit und Datensicherheit.
Plan
Zeitplan
gantt title August - September (20UE LF7) dateFormat YYYY-MM-DD axisFormat %d.%m. section Do 28.08. 5 Einführung, Grundlagen CPS, Schnittstellen, Einheiten :2025-08-28, 5h section Fr 29.08. 6 Widerstände, Logikgatter, Binäres Rechnen, DevOps :2025-08-29, 4h SOL Git :crit, 2025-08-29, 2h section Do 04.09. 5 Q&A, Wiederholung :2025-09-04, 5h Nachhilfe :2025-09-04, 2h section Fr 05.09. 4 Klassenarbeit :crit, 2025-09-05, 2h GPIO, Mikrocontroller, Raspberry Pi, Simulator :2025-09-05, 2h
gantt title Oktober (38UE IoT + 8UE LF8) dateFormat YYYY-MM-DD axisFormat %d.%m. section Mo 20.10. 8 IoT Kurs :2025-10-20, 8h section Di 21.10. 8 IoT Kurs :2025-10-21, 8h section Mi 22.10. 8 IoT Kurs :2025-10-22, 8h section Do 23.10. 8 IoT Kurs :2025-10-23, 8h section Fr 24.10. 6 IoT Kurs :2025-10-24, 6h section Mi 29.10. 3 Standards, Protokolle, HTTP :2025-10-29, 3h section Do 30.10. 5 JSON, XML, HTML, URL :2025-10-30, 5h <!--LF8b-->
gantt title Dezember (13UE LF7 + 23UE LF8 + 2UE PV) dateFormat YYYY-MM-DD axisFormat %d.%m. section Mo 01.12. 3 HTTP, MQTT :2025-12-01, 3h section Di 02.12. 3 UART, I2C, SPI :2025-12-02, 3h section Do 04.12. 5 Wiederholung, Q&A :2025-12-04, 5h section Fr 05.12. 8 Klassenarbeit :crit, 2025-12-05, 2h LF8 Programmierübung :2025-12-05, 4h SOL LF8 Praxis :crit, 2025-12-05, 2h section Mo 08.12. 3 JSON, JSON Schema :2025-12-08, 3h section Di 09.12. 3 XML, DTD, SOAP :2025-12-09, 3h section Mi 10.12. 5 LF8 REST, Node-RED, OpenAPI, FastAPI (, SQLite, SQL-Injections) :2025-12-10, 5h section Fr 12.12. 8 LF8 Praxis :2025-12-12, 6h SOL PV :crit, 2025-12-12, 2h
gantt title Januar-Februar (31UE LF8 + 18UE PV) dateFormat YYYY-MM-DD axisFormat %d.%m. section Mo 12.01. 3 PV :2026-01-12, 3h section Di 13.01. 3 Wiederholung APIs, Datenaustauschformate :2026-01-13, 3h section Mi 14.01. 5 Wiederholung DB, SQL :2026-01-14, 5h section Do 15.01. 5 Q&A, Übungsaufgaben :2026-01-15, 5h section Fr 16.01. 8 Klassenarbeit :crit, 2026-01-16, 2h LF8 ERM + Praxis :2026-01-16, 4h SOL ERM :crit, 2026-01-16, 2h section Mo 02.02. 5 LF8 Praxis :2026-02-02, 5h section Di 03.02. 3 LF8 Praxis :2026-02-03, 1h PV :2026-02-03, 2h section Mi 04.02. 4 LF8 Projektpräsentation :2026-02-04, 4h section Do 05.02. 5 PV :2026-02-05, 5h section Fr 06.02. 8 PV :2026-02-06, 6h SOL PV :crit, 2026-02-06, 2h
gantt title März (11UE LF7) dateFormat YYYY-MM-DD axisFormat %d.%m. section Do 26.03. 5 Docker :2026-03-26, 5h section Fr 27.03. 6 Vorbereitung Praxisprojekt :2026-03-27, 4h SOL Projektplan :crit, 2026-03-27, 2h
gantt title Mai-Juni (33UE LF7) dateFormat YYYY-MM-DD axisFormat %d.%m. section Do 21.05. 5 Vorstellung Praxisprojekte :crit, 2026-05-21, 2h Praxis :2026-05-21, 3h section Fr 22.05. 6 Praxis :2026-05-22, 4h SOL Projektdokumentation :crit, 2026-05-22, 2h section Di 09.06. 6 Praxis :2026-06-09, 6h section Mi 10.06. 5 Praxis (Benotung) :crit, 2026-06-10, 5h section Do 18.06. 5 Praxis :2026-06-18, 5h section Fr 19.06. 6 Projektpräsentation :2026-06-19, 4h SOL Projektdokumentation :2026-06-19, 2h
Leistungskontrollen
- Soll Notendichte: 7
- Minimum Klassenarbeiten (>45min, doppelte Wertung): 2
- Sonstige Noten: >=3
- 1. Klassenarbeit 05.09. ~90min (einseitig beschrifteter A4 Notizzettel + 1 einfacher Taschenrechner ohne Binärberechnungen)
- Grundlagen CPS, Begriffe: CPS, System, Anwendungsfelder, Technologien
- Industrie 4.0
- Schnittstellen: HCI, M2M, CPS, Sensor, Aktuator
- Elektrische Einheiten
- Widerstände
- Berechnung von (Vor-)Widerständen
- Pullup-/Pulldown-Wiederstände
- Logische Verknüpfungen (Not, And, Or, XOr)
- Wahrheitswertetabelle
- Schaltung mit einfachen (Um-)Schaltern
- Rechnen mit Binärzahlen, Zweierpotenzen
- Grundlagen Git
2. Klassenarbeit 05.12. (1.+2. UE) ~90min (einseitig beschrifteter A4 Notizzettel)
- Auswahl Hardwareplatformen und Programmiersprachen
- Rechnernetze / Topologien
- OSI-Modell (insbesondere Physical Layer und anwendungsorientierte Protokolle)
- HTTP, MQTT
- UART, SPI, I²C
- Grundlagen Programmierung (Variablen, Datenstrukturen, Schleifen, Bedingungen, Funktionen)
- Siehe Programmierbeispiele Pi, I²C-Beispiel (main.py)
Programmier-Übungsaufgaben:
- Mündliche Note 21.05.
- Vorstellung Projektplan (SOL vom 27.03.)
- Bisherige Mitarbeit
- Bewertung Praxisprojekt am 10.06.
- Note für fachliche Leistung
- Note für Mitarbeit
- Projektpräsentation 19.06. (nach Notenschluss)
Literatur
Lehrbuch
„IT-Berufe Fachstufe Technische IT-Berufe Lernfelder 6-9“
Westermann
- Auflage 2022
ISBN 978-3-14-220036-1
FI-Abschlussprüfungen der IHK (Teil 1+2, FISI+FIAE)
2021 - 2025
Prüfungskatalog FISI + FIAE
„Prüfungskatalog für die IHK Abschlussprüfungen — Fachinformatiker Fachinformatikerin Fachrichtung Systemintegration — Verordnung über die Berufsausbildung zum Fachinformatiker/ zur Fachinformatikerin“
Zentralstelle für Prüfungsaufgaben der Industrie- und Handelskammern (ZPA) Nord-West
- Auflage 2024 (Stand 10/2024)
Lernkarten für IHK-Abschlussprüfungen (Teil 1+2, FISI+FIAE)
u-form Verlag 2024
Prüfungsvorbereitung FISI
„Prüfungsvorbereitung Aktuell — Teil 2 der gestreckten Abschlussprüfung Fachinformatiker/-in Systemintegration (nach der neuen Ausbildungsverordnung ab August 2020)“
Europa-Fachbuchreihe
- Auflage 2022
ISBN 978-3-7585-3169-9
Grundlagen CPS
Was sind Cyber-physische Systeme?
=> Ein CPS ist eine Verbindung eines IT-Systems (Hard-&Software) mit physischen Bauteilen, die miteinander kommunizieren. Sprich ein CPS verbindet die virtuelle Welt mit der realen.
Was ist „Cyber“ und wo kommt das Wort her?

Kritik

Anwendungsfelder
- Industrie 4.0 = ist die Bezeichnung für Projekte zur umfassenden Digitalisierung der industriellen Produktion.
- Smart Grids (deutsch: Intelligentes Stromnetz)
- Logistik, Verkehrssteuerung
- E-Health
- Sicherheits- & Fahrerassistenzsysteme
- Frühwarnsysteme für Katastrophenschutz (Bsp. Tsunami)
Relevante Technologien
-
Eingebettete Systeme => sind Computer Systeme die Verbaut sind für ein bestimmten Anwendungsfall (z.B. Kassensysteme)
-
Sensornetze => sind ein Verbund aus Sensoren in einem bestimmten Bereich
-
Internet-Infrastruktur => Geräte werden mit Internet ausgestattet und verbunden
-
Echtzeitverarbeitung => Daten werden in Echtzeit verarbeitet
Begriffe
flowchart TB cps(CPS) cps --> iot(IoT) iot --> smarthome(Smart Home) smarthome --> smarthealth(Smart Health) smarthome --> VR smarthome --> AR smarthome --> sprache(Spracherkennung & -steuerung) iot --> smartgrid(Smart Grid) iot --> smartcities(Smart Cities) iot --> iiot(IIoT) cps -.-> cppc(CPPC) -.-> iiot iiot --> industrie40(Industrie 4.0) industrie40 --> smartfactory(Smart Factory)
Begriffserklärungen
IoT
Internet of Things
=> Sammelbegriff für CPS-Geräte, die über das Internet kommunizieren können

VR
Virtuelle Realität
=> computergenerierte, interaktive, virtuelle Umgebung

AR
Augmented Reality
=> erweiterte Realität

CPPC
Cyber Physical Production Control
„Industrie 4.0“
„Industrie 4.0 ist die Bezeichnung für Projekte zur umfassenden Digitalisierung der industriellen Produktion.
Das Projekt geht zurück auf die Forschungsunion der deutschen Bundesregierung und ein gleichnamiges Projekt in der Hightech-Strategie der Bundesregierung.“ [1]
- industrielle Revolution bestand in der Mechanisierung mittels Wasser- und Dampfkraft (ab ~1790)
- industrielle Revolution geprägt durch Massenfertigung mit Hilfe von Fließbändern und elektrischer Energie (ab ~1870)
- industrielle Revolution oder digitale Revolution Automatisierung durch Einsatz von Elektronik und IT (v. a. die speicherprogrammierbare Steuerung und die CNC-Maschine) (ab ~1970)
- industrielle Revolution: Netzwerke, CPS, Industrial Internet of Things, Smart Factory, Cyber Physical Production Control (ab ~2017)
Schnittstellen
Wie kommunizieren Mensch, „Cyber“ und Physik miteinander?
„Aus CPS-Sicht“
HCI vs M2M vs CPS
flowchart LR
Mensch <--HCI--> Cyber
subgraph CPS[Cyber-physisches System]
subgraph Cyber[Cyber System]
Computer1 <--M2M--> Computer2
end
subgraph PS[Physisches System]
subgraph Schnittstelle
Aktuator
Sensor
end
subgraph I[Geräte / Anlagen]
Maschine1
Maschine2
end
end
PS --messen--> Cyber
Cyber --ansteuern--> PS
end
Mensch <-..-> PS
HCI
(Human–computer interaction / Human-computer Interface)
-> Mensch-Maschine-Interaktion / Benutzerschnittstelle
M2M
(Machine-to-Machine)
CPS
(Cyber-physical system)
„Aus Sicht eines Prozessors“
(Rechnerarchitektur / Prozessorarchitektur)
IHK-Zwischenprüfung Herbst 2018: Aufgabe 2.2
stark vereinfacht
flowchart LR
subgraph Computersystem
Arbeitsspeicher
subgraph Devices
subgraph Peripherie
Speichermedien
Netzwerkkarten
HID[Human Interface Device]
end
Controller
Koprozessoren
end
subgraph Prozessor
Bus <--> Register
Bus <--> Rechenwerk <--> Register
Bus <--> Steuerwerk <--> Register
Steuerwerk <--> Rechenwerk
end
end
Arbeitsspeicher <--> Bus
Devices <--> Bus

detailierter
flowchart TB
subgraph Motherboard[Motherboard / SoC]
Arbeitsspeicher <--MMU--> Northbridge
subgraph CPU-Chip
Northbridge <--FSB--> Bus
subgraph Prozessor-Kern
Bus <--> Register
Bus <--> Rechenwerk <--> Register
Bus <--> Steuerwerk <--> Register
Steuerwerk <--> Rechenwerk
end
end
Northbridge <--DMI--> Southbridge
end
subgraph Welt[Rest der Welt]
subgraph Devices
Device1
Device2
Device3
end
end
Southbridge <--MMIO-->Device1
Southbridge <--PMIO--> Device2
Register <--GPIO--> Device3
SoC
(System-on-a-Chip)
FSB
(Front Side Bus)
DMI
(Direct Media Interface)
MMU
(Memory Management Unit)
MMIO
(Memory-mapped I/O)
PMIO
(Port-mapped I/O)
GPIO
(General Purpose Input/Output)
lstopo -.txt
Elektrische Einheiten
| Formelzeichen | Einheit | |
|---|---|---|
U | V | elektrische Spannung |
I | A | elektrischer Strom |
R = U / I | Ω = V/A | elektrischer Widerstand |
P = U * I | W = VA | elektrische Leistung |
E (W) = P * t | Wh | elektrische Energie (Arbeit) |
Widerstände
Schaltzeichen: 

Berechnung
R = U / I
Einheit: Ω = V / A
Messung
=> mittels Ohmmeter

Vorwiderstände
=> zur Strombegrenzung
UV = U - UR
RV = UV / I
gegeben:
U => Spannungsversorgung
UR => Spannung, die über zu schützendem Bauteil (z.B. LED) abfallen soll
I => Strom, der maximal durch das zu schützende Bauteil fließen soll
gesucht:
RV => benötigter Vorwiederstand
Welchen Wiederstand wählen wir aus, wenn ein Wiederstand benötigter größe nicht vorhanden ist?
Pull-up und Pull-down
=> zieht Signalleitung standardmäßig auf gewünschten Pegel

Praxis
=> Grundschaltungen ausprobieren
-
Schaltkreis mit LED + Vorwiderstand
- Taster einbauen
- AND und OR mit 2 Tastern
-
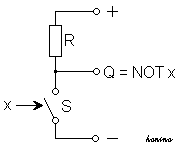
NOT mit Taster und Pull-up-Wiederstand
- 2 verschiedenfarbige LEDs am Ein-/Ausgang
- XOR mit 2 „Umschaltern“ bzw. Jumper wires
- AND, OR, NOT mit Transistoren
Zusatzaufgaben:
- XOR und Halbaddieren mit 7 Transistoren
- Volladdierer
Benötigstes Material pro Gruppe
-
Spannungsversorgung
- 5V von Raspberry-Pi + USB-Netzteil => Pinout
-
je ein Jumper Wire
female->male(rot+schwarz)
-
Breadboard + Jumper Wires
male->male(verschiedenfarbig) - 2 LEDS (verschiedenfarbig) + 2 Vorwiederstände (330Ω)
- 2 Taster
- 1 Pull-Up- bzw. Pull-Down-Widerstand (470Ω-1kΩ)
- 2 Transistoren mit 10kΩ Basis-Widerstand
Breadboard

Prozessoren
SOL „Funktionsweise von Prozessoren“
Erkundigen Sie sich selbstständig darüber, wie es möglich ist, mittels Maschinen zu rechnen. Als Einstieg wird folgendes Video empfohlen: A Computer Built With Dominos.
Beantworten Sie die folgenden Fragen:
- Wie funktioniert das Binärsystem?
- Schreiben Sie die Zahlen 0-7 als Binärzahl auf.
- Benennen Sie 4 verschiedene zweistellige logische Verknüpfungen (Logikgatter).
- Was ist ein Halbaddierer?
- Wieviele Eingänge und wieviele Ausgänge hat ein Halbaddierer?
- Zeichnen oder beschreiben Sie eine Schaltung, wie ein Halbaddierer aus einfachen Logikgattern aufgebaut werden kann.
- Finden Sie Möglichkeiten, wie Logikgatter mittels Murmeln, Wasser oder in Minecraft aufgebaut werden können?
Transistoren
![]()

Aufbau von Gattern und Addierer mit BJT-Transistioren
Von-Neumann-Zyklus
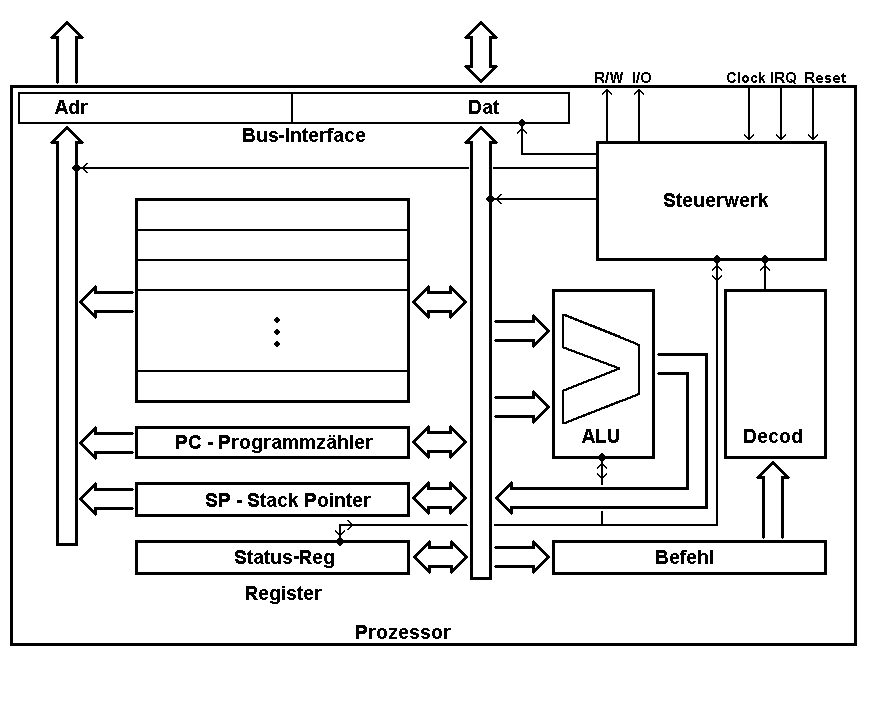
FETCH(Befehlsabruf):- Nächsten Befehl (entsprechend Adresse im Befehlszähler) aus Arbeitsspeicher in das Befehlsregister laden und Befehlszähler inkrementieren
DECODE(Dekodierung):- Der Befehl wird durch das Steuerwerk in Schaltinstruktionen für das Rechenwerk aufgelöst
FETCH OPERANDS(Operandenabruf):- Operanden werden aus dem Speicher laden
EXECUTE(Befehlsausführung):- Arithmetische oder logische Operation wird vom Rechenwerk berechnet. (Bei Sprungbefehlen und erfüllter Sprungbedingung wird der Befehlszähler angepasst)
WRITE BACK(Rückschreiben des Resultats): Ergebnis der Berechnung wird in den Speicher zurückgeschrieben (falls nötig)
Assembler
Beispiel (blinky-rust):
git clone git@github.com:johannesloetzsch/blinky-rust-nix.git -b asm
cd blinky-rust-nix; nix develop
cargo rustc -- --emit asm
grep -m1 main_loop: -A43 target/thumbv7m-none-eabi/debug/deps/blinky_rust-*.s | bat --file-name example.s
.LBB26_1:
.loc 11 0 5 is_stmt 0
subs r0, r7, #1
.loc 11 15 9 is_stmt 1
str r0, [sp]
bl _ZN136_$LT$stm32f1xx_hal..gpio..gpioc..PC13$LT$stm32f1xx_hal..gpio..Output$LT$MODE$GT$$GT$$u20$as$u20$embedded_hal..digital..v2..OutputPin$GT$8set_high17h41a8f7d2c1b1fab3E
bl _ZN4core6result19Result$LT$T$C$E$GT$2ok17hbba81ef68e509503E
.loc 11 16 9
ldr r0, [sp, #8]
mov.w r1, #1000
str r1, [sp, #4]
bl _ZN97_$LT$stm32f1xx_hal..delay..Delay$u20$as$u20$embedded_hal..blocking..delay..DelayMs$LT$u16$GT$$GT$8delay_ms17h9fb44941d1d2b02bE
ldr r0, [sp]
.loc 11 18 9
bl _ZN136_$LT$stm32f1xx_hal..gpio..gpioc..PC13$LT$stm32f1xx_hal..gpio..Output$LT$MODE$GT$$GT$$u20$as$u20$embedded_hal..digital..v2..OutputPin$GT$7set_low17h5e48a13c9b6d1e70E
bl _ZN4core6result19Result$LT$T$C$E$GT$2ok17hbba81ef68e509503E
ldr r1, [sp, #4]
.loc 11 19 9
ldr r0, [sp, #8]
bl _ZN97_$LT$stm32f1xx_hal..delay..Delay$u20$as$u20$embedded_hal..blocking..delay..DelayMs$LT$u16$GT$$GT$8delay_ms17h9fb44941d1d2b02bE
b .LBB26_1
Binary
## laut disassembly startet <main_loop> bei 0800_016c, das ist im ELF-binary an 1_016c
hexdump -s $((16#1016c)) target/thumbv7m-none-eabi/debug/deps/blinky_rust-* |head -n4
001016c b580 466f b084 9002 e7ff 1e78 9000 f000
001017c f92f f000 f886 9802 f44f 717a 9101 f000
001018c fc30 9800 f000 f917 f000 f87b 9901 9802
001019c f000 fc27 e7e9 b580 466f f000 f800 b580
## …und an adresse 717a befindet sich #0x3e8, also #1000
hexdump -s $((16#20717a)) target/thumbv7m-none-eabi/debug/deps/blinky_rust-* |head -n 1
020717a 4202 070d 0000 0018 0000 03e8 0000 0000
Disassemble
cargo objdump -- -S target/thumbv7m-none-eabi/debug/deps/blinky_rust-* | grep -m1 '<main_loop>' -A 26
0800016c <main_loop>:
; fn main_loop(mut led: PC13<Output<PushPull>>, mut delay: Delay) -> ! {
800016c: b580 push {r7, lr}
800016e: 466f mov r7, sp
8000170: b084 sub sp, #0x10
8000172: 9002 str r0, [sp, #0x8]
; loop {
8000174: e7ff b 0x8000176 <main_loop+0xa> @ imm = #-0x2
8000176: 1e78 subs r0, r7, #0x1
; led.set_high().ok();
8000178: 9000 str r0, [sp]
800017a: f000 f92f bl 0x80003dc <_ZN136_$LT$stm32f1xx_hal..gpio..gpioc..PC13$LT$stm32f1xx_hal..gpio..Output$LT$MODE$GT$$GT$$u20$as$u20$embedded_hal..digital..v2..OutputPin$GT$8set_high17h41a8f7d2c1b1fab3E> @ imm = #0x25e
800017e: f000 f886 bl 0x800028e <_ZN4core6result19Result$LT$T$C$E$GT$2ok17hbba81ef68e509503E> @ imm = #0x10c
; delay.delay_ms(1000_u16);
8000182: 9802 ldr r0, [sp, #0x8]
8000184: f44f 717a mov.w r1, #0x3e8
8000188: 9101 str r1, [sp, #0x4]
800018a: f000 fc30 bl 0x80009ee <<stm32f1xx_hal::delay::Delay as embedded_hal::blocking::delay::DelayMs<u16>>::delay_ms::h9fb44941d1d2b02b> @ imm = #0x860
800018e: 9800 ldr r0, [sp]
; led.set_low().ok();
8000190: f000 f917 bl 0x80003c2 <_ZN136_$LT$stm32f1xx_hal..gpio..gpioc..PC13$LT$stm32f1xx_hal..gpio..Output$LT$MODE$GT$$GT$$u20$as$u20$embedded_hal..digital..v2..OutputPin$GT$7set_low17h5e48a13c9b6d1e70E> @ imm = #0x22e
8000194: f000 f87b bl 0x800028e <_ZN4core6result19Result$LT$T$C$E$GT$2ok17hbba81ef68e509503E> @ imm = #0xf6
8000198: 9901 ldr r1, [sp, #0x4]
; delay.delay_ms(1000_u16);
800019a: 9802 ldr r0, [sp, #0x8]
800019c: f000 fc27 bl 0x80009ee <<stm32f1xx_hal::delay::Delay as embedded_hal::blocking::delay::DelayMs<u16>>::delay_ms::h9fb44941d1d2b02b> @ imm = #0x84e
80001a0: e7e9 b 0x8000176 <main_loop+0xa> @ imm = #-0x2e
bare-metal-programming
Logikgatter
Aufgabe 6 von Seite 78 aus „Prüfungsvorbereitung Aktuell Teil 1“ (Europa Verlag)
NOT
Y = NOT X = ¬ X = X̅
| X | NOT X |
|---|---|
| 0 | 1 |
| 1 | 0 |

AND
Y = X1 AND X2 = X1 & X2 = X1 ∧ X2 = X1 • X2 = X1 X2
| X1 | X2 | X1 AND X2 |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |


OR
Y = X1 OR X2 = X1 ∨ X2 = X1 + X2
| X1 | X2 | X1 OR X2 |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |


XOR
Y = X1 XOR X2 = X1 ⊕ X2
| X1 | X2 | X1 XOR X2 |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |




Halbaddierer
| X1 | X2 | Übertrag c | Summe s |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 1 |
| 1 | 0 | 0 | 1 |
| 1 | 1 | 1 | 0 |

Volladdierer
| X1 | X2 | Cin | Cout | s |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 1 |
| 0 | 1 | 0 | 0 | 1 |
| 0 | 1 | 1 | 1 | 0 |
| 1 | 0 | 0 | 0 | 1 |
| 1 | 0 | 1 | 1 | 0 |
| 1 | 1 | 0 | 1 | 0 |
| 1 | 1 | 1 | 1 | 1 |

Praxis
Schaltungen für Aufbau von Gattern und Addierer mit npn-BJT-Transistioren
Binärzahlen
Computer kennen nur 1 und 0 und arbeiten mit Binärzahlen (im Dualsystem).
Wieviele Zustände können mit einer gegebenen Anzahl von Bits dargestellt werden?
Umrechnung
Addition
Integer overflow
Integration (ergänzen / zusammenführen)
Was soll/kann woran ergänzt oder zusammengeführt werden?
Wie sollte eine Systemarchitektur aussehen, damit sie:
- Möglichst gut ergänzt oder mit anderen Systemen zusammengeführt werden kann?
- Effektiv entwickelt, gewartet und ergänzt werden kann?
- „Sicher“ ist?
Best Practice
- Modularisierung
- Schnittstellen
- gut designen
- wo?
- welche?
- dokumentieren
- gut designen
- bestehende, verbreitete, offene Standards nutzen
- Schnittstellen
- Protokolle
- Bibliotheken
- Protokolle
- Schnittstellen
- Versionieren
- git
DevOps
Development + Operations
Ziele:
- Kontinuierliche Bereitstellung von Prototypen und aktuellen Produkten
(Release-Zyklen verringern)- Zeit zwischen Korrekturen und Verbesserungen verkürzen
- Fehlerrate in Releases reduzieren
- „schnellere Markteinführung des Endproduktes“
Konzept / Ansatz / Prinzipien
- „sicher“ und reproduzierbar (wiederholbar) implementieren
- Lösungen im Rahmen der Entwicklung kontinuierlich in produktionsähnlichen Umgebungen testen
- operative Qualität (Betrieb) überwachen und validieren
- Feedbackschleifen
DevOps-Kultur / CALMS
- Culture
- Automation
- Lean
- Measurement
- Sharing
7 DevOps-Phasen
(„Stages“ / „Lifecycle“)
- Plan
- Code
- Build
- Test
- Release
- Deploy
- Operate
DevOps-Praktiken
=> Einsatz von Git
Standards / Normen
Wofür werden Standards benötigt?
Welche Standards und Standardisierungsgremien kennen Sie?
graph TB Standards[Technische Standards] --> Industriestandard[Industriestandard / De-facto-Standard] Standards --> Normen[Internationale Normen / De-jure-Standards] Normen -..-> DIN Normen -..-> WSC WSC -..-> ISO WSC -..-> ITU WSC -..-> IEC Normen -..-> IEEE Normen -..-> W3C Normen -..-> IETF -..-> RFC
Normen können auch Spaß machen…

…und Spaß mit nicht normierten Produkten:
Category:Forbidden electrical items

OSI Modell
(Open Systems Interconnection model)
Was ist ein Modell? Wofür sind Modelle wichtig?
7 OSI Layer
| OSI-Schicht | Einordnung | TCP/IP-Referenzmodell | Protokollbeispiele | Einheiten | Kopplungselemente | ||
|---|---|---|---|---|---|---|---|
| 7 | Anwendung (Application) | ||||||
| 6 | Darstellung (Presentation) | ||||||
| 5 | Sitzung (Session) | Anwendungsorientiert | Anwendung | ||||
| HTTP, MQTT, DHCP, DNS | Daten | ||||||
| 4 | Transport | Transportorientiert | Transport | TCP, UDP | (TCP) Segmente, (UDP) Datagrame | ||
| 3 | Vermittlung (Network) | Ende-zu-Ende | Internet | IPv4, IPv6, ICMP | Pakete | Router, Layer-3-Switch | |
| 2 | Sicherung (Data Link) | Punkt-zu-Punkt | Netzzugriff | ARP, MAC, IEEE 802.11 (WLAN) | Rahmen (Frames) | Bridge, Layer-2-Switch, Wireless Access Point | |
| 1 | Bitübertragung (Physical) | RS-232 (Serielle Schnittstelle), 1000BASE-T (Twisted-Pair GbE), 100GBASE-LR4 (Glasfaser) | Bits, Symbole | Leitungen, Stecker, Hubs, Repeater |
Rechnernetze
Topologien
Welche Topologien kennt ihr? Wo finden sie Anwendung?
Welche Vor- und Nachteile haben verschiedene Topologien?

Bussysteme
Für welche Einsatzzwecke sind Bussysteme attraktiv? Warum?

graph TB Bussysteme --> On-Chip[On-Chip Bus] Bussysteme --> Inter-Chip[Inter-Chip Bus] Inter-Chip -..-> FSB[Front Side Bus] Inter-Chip -..-> DMI[Direct Media Interface] Bussysteme --> Peripheriebus Peripheriebus -..-> intern intern -..-> PCI intern -..-> sata[Serial ATA] intern -..-> I2C intern -..-> SPI Peripheriebus -..-> extern extern -..-> seriell[Serielle Schnittstelle] extern -..-> parallel[Parallele Schnittstelle] extern -..-> USB Bussysteme --> Feldbus -..-> CAN[z.B. CAN]
SPI
(Serial Peripheral Interface)

- 4 Signalleitungen
- SCLK = Serial Clock
- MOSI / PICO = Master Out / Slave In bzw. Peripheral In / Controller Out
- MISO / POCI = Master In / Slave Out bzw. Peripheral Out / Controller In
- SS / CS = Slave Select bzw. Chip Select
I²C

-
Master-Slave-Bus
-
zwei Signalleitungen
- SCL = Serial Clock
- SDA = Serial Data
-
7-bit Adressraum
Beispiel: I2C-LCD-Display
Anwendungsfälle
Protokolle
Was sind Protokolle?
Protokolle definieren Regeln und Standards, die die Kommunikation und den Datenaustausch zwischen Geräten oder Systemen regeln.
Fragen zu Protokollen
-
Welche Arten von Protokollen gibt es?
- Es gibt verschiedene Protokollarten wie Netzwerkprotokolle (z. B. TCP/IP), Sicherheitsprotokolle (z. B. SSL/TLS) und Übertragungsprotokolle (z. B. HTTP, FTP).
-
Warum sind Protokolle in Netzwerken wichtig?
- Protokolle gewährleisten zuverlässige und effiziente Datenübertragung und definieren, wie Informationen über ein Netzwerk transportiert werden.
-
Welche Sicherheitsaspekte sind bei Protokollen relevant?
- Authentifizierung, Verschlüsselung und Integrität der Daten sind entscheidend, um vertrauliche Informationen zu schützen.
-
Wie unterscheiden sich verbindungsorientierte und verbindungslose Protokolle?
- Verbindungsorientierte Protokolle (wie TCP) garantieren die Datenlieferung, während verbindungslose Protokolle (wie UDP) die Daten ohne Bestätigung senden.
-
Welche Rolle spielt die Latenz bei der Protokollauswahl?
- Protokolle mit niedriger Latenz sind wichtig für Echtzeitanwendungen, während andere Anwendungen mehr Fehlerkorrektur benötigen.
-
Was bedeutet Protokoll-Interoperabilität?
- Verschiedene Systeme sollten mithilfe standardisierter Protokolle miteinander kommunizieren können, um Kompatibilität zu gewährleisten.
-
Wie kann man die Effizienz eines Protokolls messen?
- Wichtige Kennzahlen sind Bandbreite, Latenz, Fehlerrate und die Komplexität des Overheads.
-
Welche Rolle spielen Protokollschichten in einem Netzwerk?
- Verschiedene Schichten (z. B. OSI-Modell) trennen Funktionen wie Transport, Datenverbindung und Anwendung, was die Komplexität reduziert und Flexibilität ermöglicht.
Protokolle sind das Rückgrat moderner Netzwerke, daher ist die Auswahl eines geeigneten Protokolls entscheidend für die Leistungsfähigkeit und Sicherheit der Systeme.
Bitübertragung == Physical Layer
Serielle Schnittstelle
UART
(Universal Asynchronous Receiver Transmitter)

Beim Anschließen bitte beachten:
- Spannungspegel
- Baudrate
- Parity-Bit
- Stopp-Bit

RS-232
DE9 Stift (männlich) und Buchse (weiblich)
- D-Sub 9-polig


Ethernet Bitübertragung
Kupferkabel
z.B. 1 Gbit/s 1000BASE-T == IEEE 802.3 Clause 40 (früher IEEE 802.3ab)
- mindestens Cat-5 Twisted-Pair-Kabel
Lichtwellenleiter
z.B. 1 Gbit/s 1000BASE-LX == IEEE 802.3 Clause 38 (früher IEEE 802.3z)
- 1310 nm Wellenlänge
- Singlemode
z.B. 100 Gbit/s 100GBASE-LR4
- 100GBASE-R mit 1 OS2-Glasfaser
- vier Farben
- Singlemode

Anwendungsorientiert
HTTP
- Server + Clients
- Übertragung von Daten/Dateien
- Für jede Übertragung wird eine neue TCP-Verbindung auf- und abgebaut
Layer
5-7
- baut auf TCP/IP (Layer 4/3) auf
- wenn SSL/TLS genutzt wird, ist es wie ein zusätzlicher Layer zwischen 4 und 5
Ports
- 80 Standardport HTTP://
- 443 HTTPS://
Methoden (Verben)
- GET
- POST
- PUT
- DELETE
- …
Statuscodes
- 200 OK
- 301 Redirect
- 404 Not Found
- 503 Service Unavailable
- 418 I'm a Teapot
HTTP-Response
HTTP 1.1 200 OK ## Protokoll-Version + Statuscode
Content-Type: text/html
… ## Weitere Header (key+value)
## Leerzeile<html> ## Content
…
</html>
REST
Beispiel APIs
Nominatim
„Free-form query“ mit q=
„Structured query“ mit city= und optional countrycodes=
Mit format=xml
Ohne format=
Swagger Petstore
Dokumentation
Benötigte Informationen über API-Endpunkte:
- URL (Protokoll, Host, Port, Pfad)
- HTTP-Methode
- Query Parameter
- Request Body
- Request Header (z.B. Authorization)
- Responese Body
- MimeType (z.B. application/json)
- Encoding (z.B. UTF-8)
- Schema (z.B. JSON-Schema, DTD)
Empfehlung: OpenAPI Specification / Swagger zur automatischen Dokumentation verwenden
Beispiel Code
- Node-RED
- Python: ./examples/rest/python/
Sicherheit
OWASP Top 10 Web Application Security Risks
Relevante IT-Grundschutz-Bausteine:
- CON.2 Datenschutz
- CON.8 Software-Entwicklung
- CON.10 Entwicklung von Webanwendungen
- APP.3.1 Webanwendungen und Webservices
- APP.3.2 Webserver
Beispiel
APP.3.1.A21 Sichere HTTP-Konfiguration bei Webanwendungen
Zum Schutz vor Clickjacking, Cross-Site-Scripting und anderen Angriffen SOLLTE der IT-Betrieb geeignete HTTPResponse-Header setzen. Dazu SOLLTEN mindestens die folgenden HTTP-Header verwendet werden:
Weitere Infos bei OWASP
Node-RED
Low-code programming for event-driven applications

💻 Beispiel flow.json
Setup
via Docker
docker volume create --name node_red_data
docker run -it -p 1880:1880 -v node_red_data:/data --name mynodered nodered/node-red --dns 8.8.8.8
Documentation
Swagger
Setup
Menü -> User Settings -> Palette -> Install
openapi-red(Client)node-red-node-swagger(Documentation Generator)
Benutzung Client
openApi-redNode statthttp requestNode benutzen
Benutzung Documentation Generator
-
http inNode nutzen und optionalDocsProperty editieren -
Swagger UI (Live Demo) starten
http://localhost:1880/http-api/swagger.jsoneintragen- mit
Exploreladen
Python HTTP-Request Example
(using the library requests)
git clone https://github.com/johannesloetzsch/LF7.git
cd src/examples/rest/python/client
python -m venv .venv
source .venv/bin/activate
python -m ensurepip
pip install -r requirements.txt
python ./example.py
Code: ./example.py
More: Documentation of requests library
Python REST example
Der Beispielcode rest.py nutzt die Bibliothek FastAPI um eine REST-API mit Swagger UI bereitzustellen.
Usage
git clone https://github.com/johannesloetzsch/LF7.git
cd src/examples/rest/python
python -m venv .venv
source .venv/bin/activate
python -m ensurepip
pip install -r requirements.txt
python rest.py
http://localhost:8000/index.html
Development
To run a devserver with automatic reloading when code changed, use:
uvicorn rest:app --reload
MQTT
„Message Queuing Telemetry Transport“
-
Publish/Subscribe
-
Clients können ein „Topic“ abonnieren
- TCP-Verbindung wird offen gehalten
- Server kann Clients über bestehende Verbindung über Updates informieren
mosquitto ## start the broker
mosquitto_sub -h 127.0.0.1 -p 1883 -u fi -P geheim -t fi/buttonGPIO2
mosquitto_pub -h 127.0.0.1 -p 1883 -u fi -P geheim -t fi/buttonGPIO2 -m '1'
Praxis
💡 Überlegungen zum Praxiseinstieg
Ressourcen
- Materialsammlung zum Erlernen von Python
- Raspberry Pi
- Microcontroller
Beispielprojekte
Ergebnisse von Schülerprojekten aus dem Vorjahr:
-
„Alarmanlage“ mit ESPHome
-
Convert YouTube playlists into sponsor-free podcasts with automated segment removal
Praxiseinstieg
Relevanz für Ausbildung und Berufsleben
❓💬 Vergleichen Sie, welche der Lernfelder von LF7-LF9 besonders relevant für
Anwendungsentwickler bzw. Systemintegratoren sind.
LF 7: Cyber-physische Systeme ergänzen
LF 8: Daten systemübergreifend bereitstellen
LF 9: Netzwerke und Dienste bereitstellen
=> DevOps
🙏 Überprüfen Sie im IoT-Kurs, welche Inhalte derzeitiger Lernfelder für die Projekte relevant sind.
Komponenten von CPS
❓ Beurteilen Sie, welche Komponente von CPS ist für uns besonders relevant ist.
flowchart LR
Mensch <--HCI--> Cyber
subgraph CPS[Cyber-physisches System]
subgraph Cyber[Cyber System]
Computer1 <--M2M--> Computer2
end
subgraph PS[Physisches System]
subgraph Schnittstelle
Aktuator
Sensor
end
subgraph I[Geräte / Anlagen]
end
end
PS --messen--> Cyber
Cyber --ansteuern--> PS
end
❓💡 Benennen Sie Bauteile, die als Kernkomponenten in CPS / IoT-Geräten verbaut werden.
heutige Lernziele
- Mikrocontroller kennen lernen und von Einplatinencomputer unterscheiden
- Geeignete Hardware für CPS/IoT-Projekte auswählen
- Verstehen was ein Pinout ist und was die damit verbundenen Herausforderungen in der Praxis sein können (=> HAL)
- Plattformen und Frameworks für IoT-Anwendungen kennen lernen
- Programmiersprache für Projekte auswählen
mittelfristige Ziele
- selbstständige Praxisfähigkeiten (weiter-)entwickeln
- technischen Dokumentation lesen, verstehen, schreiben
- Komplexität begreifen und kontrollieren
- effizient Debuggen
- Sicherheit einschätzen und im erforderlichen Maß umsetzen
=> Systeme designen, entwickeln, ergänzen, integrieren, …
Git
Praxis
Beispiel
Die aus meiner Sicht für Anfänger wichtigsten Operation:
## Eine Kopie eines existierenden Repositories klonen und in das Verzeichnis wechseln
git clone https://github.com/johannesloetzsch/LF10b.git
cd LF10b/
## Eine Datei editieren, die Änderungen betrachten und rückgängig machen
nano src/versionierung.md
git status
git diff
git restore src/versionierung.md
## Eine Datei editieren, die Änderungen betrachten…
nano src/versionierung.md ## man könnte auch vim benutzen
git status
git diff
## Die geänderte Datei für den nächsten Commit einplanen
git add src/versionierung.md
git status
## Einen neuen Commit erstellen
git commit
## Die Commit-Historie anschauen
git log
## Ein neues Git-Repository anlegen und in das Verzeichnis wechseln
git init myproject
cd myproject/
SOL
Erarbeiten Sie sich die Grundlagen zu Git.
Von folgenden Subcommands sollten Sie wissen, was sie tun:
git init
git clone
git status
git add
git diff
git commit
git restore
Empfehlung: Wenn Git für sie komplett neu ist, probieren sie zum lernen gerne die ersten Level von https://ohmygit.org/
Abgabe: Als Ergebnis wird erwartet, dass Sie zwischen folgenden beiden Aufgaben auswählen:
Variante 1:
a) erstellen Sie per "git init" ein neues git Repository
b) legen Sie die Dateien aus ihrem Arduine-Projekt in dem Repository ab
c) wählen Sie die Daten zum commit aus ("git add") und erstellen Sie einen commit
d) ändern Sie Dateien oder fügen Sie neue Dateien (z.B. eine README.md) hinzu
e) erstellen Sie einen zweiten commit mit den Änderungen
f) versuchen Sie Ihr git Repository auf einen Git-Server (z.B. https://github.com oder https://gitlab.com) hochzuladen. Wenn Sie erfolgreich sind, reicht als Abgabe ein Link
g) falls Sie mit f) nicht erfolgreich waren, erzeugen Sie ein zip-Archiv des Repositories und laden Sie dieses als Abgabe hoch
Variante 2:
a) erstellen Sie einen Github-Account (wenn Sie noch keinen haben)
b) forken Sie mein repository https://github.com/johannesloetzsch/LF7
c) clonen Sie ihren Fork auf ihren Computer
d) editieren Sie mindestens eine Datei (beheben Sie z.B. einen Tipp-/Rechtschreibfehler oder fügen sie zu einem Thema ergänzende Informationen wie einen nützlichen Link oder den Vorschlag einer Definition eines Begriffes hinzu)
e) commiten und pushen Sie die Änderungen
f) stellen Sie mir einen Pull-Request (das reicht als Abgabe)
Zusatzaufgabe für Schüler, die sich bereits mit Git auskennen:
Frischen Sie ihr Wissen zu DevOps auf.
Zusammenfassung Git
Was ist Git?
Git ist ein Programm, das dir hilft, den Überblick über Dateien in einem Projekt zu behalten. Es speichert Änderungen, die du an deinen Projekten machst, und ermöglicht es dir, ältere Versionen wiederherzustellen. So kannst du jederzeit zu einer früheren, festgehaltenen Version zurückkehren. Git bietet viele Vorteile: Es erleichtert die Teamarbeit, da mehrere Personen gleichzeitig an einem Projekt arbeiten können. Außerdem sorgt es für mehr Organisation, da du genau sehen kannst, wer welche Änderungen vorgenommen hat und wann diese passiert sind.
Mit Git kannst du Änderungen festhalten, indem du deine Arbeit speicherst, was als "committen" bezeichnet wird. Du kannst auch verschiedene Versionen miteinander vergleichen, um genau zu erkennen, was sich geändert hat. Darüber hinaus unterstützt Git in Verbindung mit einem Server die Zusammenarbeit, indem es dir ermöglicht, Dateien mit anderen zu teilen und Änderungen miteinander zu kombinieren.
Git wurde 2005 von Linus Torvalds, dem Schöpfer des Linux-Kernels, entwickelt, um die Versionsverwaltung für große Softwareprojekte zu verbessern. Es entstand als Antwort auf die Notwendigkeit eines schnellen, verlässlichen und verteilten Systems zur Zusammenarbeit in Entwicklerteams.
Grundlegende Konzepte
Git basiert auf einigen grundlegenden Konzepten, die wichtig sind, um es effektiv zu nutzen. Das Herzstück
eines Git-Projekts ist das Repository. Ein Repository ist wie ein Ordner, der nicht nur deine Dateien enthält,
sondern auch alle Änderungen, die du daran vornimmst. Du kannst ein neues Repository erstellen, indem du den
Befehl git init in deinem Projektordner ausführst. Dadurch wird Git in diesem Ordner aktiviert und bereitgestellt,
um Änderungen zu verfolgen.
Sobald du eine Änderung an deinen Dateien vorgenommen hast, kannst du diese mit dem Befehl git add zur sogenannten
Staging-Area hinzufügen. Hier sammelst du Änderungen, die du in einem Schritt speichern möchtest. Mit git commit
werden diese Änderungen dann endgültig festgehalten und in die Historie aufgenommen. Ein Commit speichert also
einen "Stand" deines Projekts, der später wiederhergestellt werden kann.
Möchtest du wissen wie der aktuelle Stand der erstellten Daten ist, kannst du git status verwenden.
Um Änderungen nachzuvollziehen, bietet Git verschiedene Befehle. Mit git show kannst du dir die Details eines
bestimmten Commits ansehen, z. B. welche Dateien geändert wurden. Der Befehl git diff zeigt dir die Unterschiede
zwischen zwei Versionen deiner Dateien. Um den gesamten Verlauf deiner Änderungen zu sehen, kannst du git log
verwenden, das dir alle Commits in einer chronologischen Liste anzeigt.
Branches
Ein Branch (zu Deutsch: Zweig) ist wie ein separater Arbeitsbereich innerhalb eines Projekts. Stell dir vor, du arbeitest an einem neuen Feature oder möchtest etwas ausprobieren, ohne die Hauptversion deines Projekts zu verändern. Mit einem Branch kannst du diese Änderungen vornehmen, ohne die Hauptversion (oft "main" oder "master" genannt) zu beeinflussen. Sobald du zufrieden bist, kannst du die Änderungen wieder mit der Hauptversion zusammenführen.
Branches ermöglichen es, parallel zu arbeiten - sei es allein oder im Team. So kannst du sicher experimentieren, Fehler beheben oder neue Features entwickeln, ohne das Risiko einzugehen, den Hauptcode zu beschädigen.
Du kannst einen neuen Branch erstellen und direkt in diesen wechseln, indem du den folgenden Befehl benutzt: git checkout -b <name>.
Wenn du mit deinem Branch fertig bist und die Änderungen in die Hauptversion (oder einen anderen Branch) übernehmen möchtest,
kannst du die Branches zusammenführen - das nennt man "Mergen". Dafür wechselst du zunächst in den Zielbranch (z. B. main) mit:
git checkout main
Danach führst du die Änderungen aus deinem Arbeitsbranch mit dem Befehl git merge <name> zusammen.
Git kombiniert die Änderungen beider Branches. Falls es keine Konflikte gibt, wird der Merge automatisch abgeschlossen.
Mergekonflikte
Warum treten Konflikte auf?
Konflikte in Git entstehen, wenn Git nicht automatisch entscheiden kann, wie Änderungen von verschiedenen Branches kombiniert werden sollen. Das passiert typischerweise, wenn:
- Zwei Branches dieselbe Stelle in einer Datei verändert haben.
- Eine Änderung in einem Branch eine Datei löscht, die im anderen Branch geändert wurde.
- Änderungen aus unterschiedlichen Branches logisch nicht zusammenpassen. Git markiert diese Konflikte und fordert dich auf, sie manuell zu lösen. Danach kannst du die Änderungen zusammenführen.
Konflikte manuell lösen
Wenn ein Konflikt auftritt, zeigt Git betroffene Dateien im Statusbericht an. Die Datei enthält Markierungen, die die widersprüchlichen Änderungen anzeigen. Du löst den Konflikt, indem du die Markierungen entfernst und die Datei so bearbeitest, dass sie die gewünschte Version enthält. Das sieht z.B. so aus:
<<<<<<< HEAD
Text aus dem main-Branch
=======
Text aus dem feature-branch
>>>>>>> feature-branch
Remote Repositories zur Zusammenarbeit
Für die Zusammenarbeit von mehreren Personen benötigt man einen Git Server. Prinzipiell kann jede Installation von Git als Server fungieren, solange alle Nutzer diese erreichen können. Häufig werden Platformen wie GitHub, GitLab oder Gitea verwenden, die weitere Funktionen wie Issue-Tracking und automatisierungen (z. B. continuous integration) bieten.
Um nun das lokale Repository mit dem entfernten Repository zu syncronisieren werden verschiedene Befehle benötigt.
Zunächst wird das entfernte Repository mit git remote add origin <URL> unter dem Namen origin hinzugefügt.
Mit dem Befehl git push kannst du deine lokalen Commits an das entfernte Repository senden. Mit git pull holst du
dir die neuesten Änderungen vom entfernten Repository in dein lokales Repository. Diese beiden Befehle reichen aus,
damit zwei Personen gemeinsam an einem Repository arbeiten können.
Falls ihr aber gleichzeitig arbeitet oder vergisst, vor neuen Commits ein git pull zu machen, fehlen euch die
neuesten Änderungen aus dem entfernten Repository in eurer lokalen Version. Wenn dein lokales Repository schon neuere
Commits enthält und du es trotzdem mit dem Stand des entfernten Repositorys abgleichen willst, kannst du mit git fetch
die Änderungen holen und dann mit git rebase origin/branch-name in deine lokale History einfügen.
Stash
Mit Stashing kannst du Änderungen, die du noch nicht committen möchtest, vorübergehend speichern. So kannst du problemlos
an einer anderen Aufgabe weiterarbeiten, ohne deine aktuellen Änderungen zu verlieren. Wenn du den Befehl git stash
ausführst, werden alle nicht-committeten Änderungen im sogenannten Stash gespeichert. Um dir einen Überblick über die
gespeicherten Stashes zu verschaffen, kannst du git stash list verwenden. Die zuletzt gespeicherten Änderungen kannst
du mit git stash pop wiederherstellen. Dabei werden die Änderungen zurückgebracht und gleichzeitig aus dem Stash entfernt.
Falls du einen bestimmten Stash-Eintrag löschen möchtest, hilft dir der Befehl git stash drop.
Weitere Informationen
Viele Entwicklungsumgebungen bieten eine Unterstützung von Git. Die dafür entwickelten Benutzeroberflächen können den Umgang mit Git vereinfachen. Außerdem gibt es dedizierte Werkzeuge wie GitHub Desktop, welches sich nicht nur mit Repositories auf GitHub nutzen lässt.
Wenn du dein Wissen über Git vertiefen möchtest, lohnt sich ein Blick in das Buch Pro Git von Scott Chacon und Ben Straub. Es ist kostenlos online verfügbar, auch in deutscher Übersetzung, unter: https://git-scm.com/book/en/v2.
Raspberry Pi
Pinout
❗ Das Pinout ist abhängig von der Raspberry-Pi-Version
💻 Befehl um sich das Pinout eines Rapsberry-Pi auf der Kommandozeile des Pi anzeigen zu lassen:
pinout
+------------------| |--| |------+
| ooooooooooooo P1 |C| |A| |
| 1oooooooooooo +-+ +-+ |
| 1ooo |
| P5 oooo +---+ +====
| |SoC| | USB
| |D| Pi Model +---+ +====
| |S| B V2.0 |
| |I| |C|+======
| |S|| Net
| |I|+======
=pwr |HDMI| |
+----------------| |----------+
P1:
3V3 (1) (2) 5V
GPIO2 (3) (4) 5V
GPIO3 (5) (6) GND
GPIO4 (7) (8) GPIO14
GND (9) (10) GPIO15
GPIO17 (11) (12) GPIO18
GPIO27 (13) (14) GND
GPIO22 (15) (16) GPIO23
3V3 (17) (18) GPIO24
GPIO10 (19) (20) GND
GPIO9 (21) (22) GPIO25
GPIO11 (23) (24) GPIO8
GND (25) (26) GPIO7
GPIO Output
Die Zuordnung der externen Pin-Nummern zu den internen Nummen des Chips steht in:
/sys/kernel/debug/gpio
sys-Dateisystem
Als root oder Mitglied der Gruppe gpio:
grep GPIO3 /sys/kernel/debug/gpio
PIN=574
echo $PIN > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio$PIN/direction
echo 1 > /sys/class/gpio/gpio$PIN/value
echo 0 > /sys/class/gpio/gpio$PIN/value
blink.sh
PIN=574
echo $PIN > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio$PIN/direction
while true; do
echo 1 > /sys/class/gpio/gpio$PIN/value
sleep 1
echo 0 > /sys/class/gpio/gpio$PIN/value
sleep 1
done
sh blink.sh
Python
python ## öffnet eine interaktive Python-Shell
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN = 3
GPIO.setup(PIN, GPIO.OUT)
GPIO.output(PIN, True)
GPIO.output(PIN, False)
GPIO.cleanup()
blink.py
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
LED1=3
GPIO.setup(LED1, GPIO.OUT)
try:
while(True):
GPIO.output(LED1, True)
time.sleep(1)
GPIO.output(LED1, False)
time.sleep(1)
finally:
GPIO.cleanup()
python blink.py
Aufgaben
- Bauen Sie eine Schaltung und schreiben Sie das dazugehörige Programm, um abwechselnd 2 LEDs blinken zu lassen.
- Programmieren Sie eine Ampelschaltung, die in der richtigen Reihenfolge zwischen 3 LEDs umschaltet.
Zusatzaufgaben
- Programmieren Sie eine Schaltung mit 3 LEDs, welche 3 Bits darstellen, mit denen von 0 bis 7 gezählt wird.
- Schreiben Sie ein Programm, um eine 7-Segment-Anzeige anzusteuern.
GPIO Input
sys-Dateisystem
PIN=574
echo $PIN > /sys/class/gpio/export
echo in > /sys/class/gpio/gpio$PIN/direction
cat /sys/class/gpio/gpio$PIN/value
read.sh
while true; do
cat /sys/class/gpio/gpio$PIN/value
sleep 1
done
sh read.sh
Die für I²C verwendeten GPIO-PINs (BCM GPIO2 und BCM GPIO3) haben einen fest verbauten Pull-Up-Widerstand.
Python
read.py
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
BUTTON1=3
GPIO.setup(BUTTON1, GPIO.IN)
try:
while(True):
print(GPIO.input(BUTTON1))
time.sleep(1)
finally:
GPIO.cleanup()
read2.py
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
BUTTON1=3
GEDRUECKT=0
GPIO.setup(BUTTON1, GPIO.IN)
try:
while(True):
if( GPIO.input(BUTTON1) == GEDRUECKT):
print("Button wurde gedrückt")
else:
print("Button wurde nicht gedrückt")
time.sleep(1)
finally:
GPIO.cleanup()
read3.py
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
BUTTON1=3
GEDRUECKT=0
GPIO.setup(BUTTON1, GPIO.IN)
try:
print("Bitte Button drücken um fortzufahren…")
while( GPIO.input(BUTTON1) != GEDRUECKT ):
pass
print("Bitte Button loslassen um fortzufahren…")
while( GPIO.input(BUTTON1) == GEDRUECKT ):
pass
finally:
GPIO.cleanup()
print("Das Programm ist beendet")
Beispiel: Ansteuerung mittels Webserver
Aufgaben
Eränzen Sie die Programme aus dem ersten Teil (GPIO Output), so dass jeweils beim Drücken eines Knopfes auf den nächsten Zustand umgeschaltet wird:
- Bauen Sie eine Schaltung und schreiben Sie das dazugehörige Programm, um abwechselnd 2 LEDs blinken zu lassen.
- Programmieren Sie eine Ampelschaltung, die in der richtigen Reihenfolge zwischen 3 LEDs umschaltet.
Zusatzaufgaben
- Programmieren Sie eine Schaltung mit 3 LEDs, welche 3 Bits darstellen, mit denen von 0 bis 7 gezählt wird.
- Schreiben Sie ein Programm, um auf einer 7-Segment-Anzeige zu zählen.
- Schreiben Sie ein Programm, das die Zeit zählt, wie lange ein Knopf gedrückt wurde.
- Entwerfen Sie eine Schaltung, um mit dem Programm von 5. zu messen wie lange es dauert, einen Kondensator über einen Photoresistor zu (ent)laden.
Weitere einfache Sensoren
Helligkeit mit Photoresistor+Kondonsator (oder Boden-Feuchtigkeitssensor)
MotionSensor
HC-SR04 - Ultrasonic Sensor (Entfernungsmesser)
Weitere Aktuatoren/Anzeigen
Multi-character 7-segment display
Parallele Protokolle
16x2 LCD-Display
Serielle Protokolle
UART
minicom -D /dev/ttyUSB0
man minicom
-D, --device
Specify the device, overriding the value given in the configuration file.
-b, --baudrate
Specify the baud rate, overriding the value given in the configuration file.
I²C
- Displays
- GPIO-Expander
- AD/DA-Wandler
- Microcontroller
SPI
- Programmer z.B. für Arduino (ATtiny, ESP8266, ESP32)
„1-Wire“ -> „Bit-Banging“
DHT11 / DHT22 / AM2302 (Luftfeuchtigkeit+Temperatur)
Sonstiges
PiCamera
SoundBoard
Internet connection status indicator
Reaction Game
Home Assistant
Raspap
Mikrocontroller
(µController, µC, MCU, „Einchipmikrorechner“)
- Prozessor
- RAM
- Flash-EEPROM
Beispiele bekannter Mikrocontroller
-
Atmel ATtiny, ATmega
- 8bit AVR
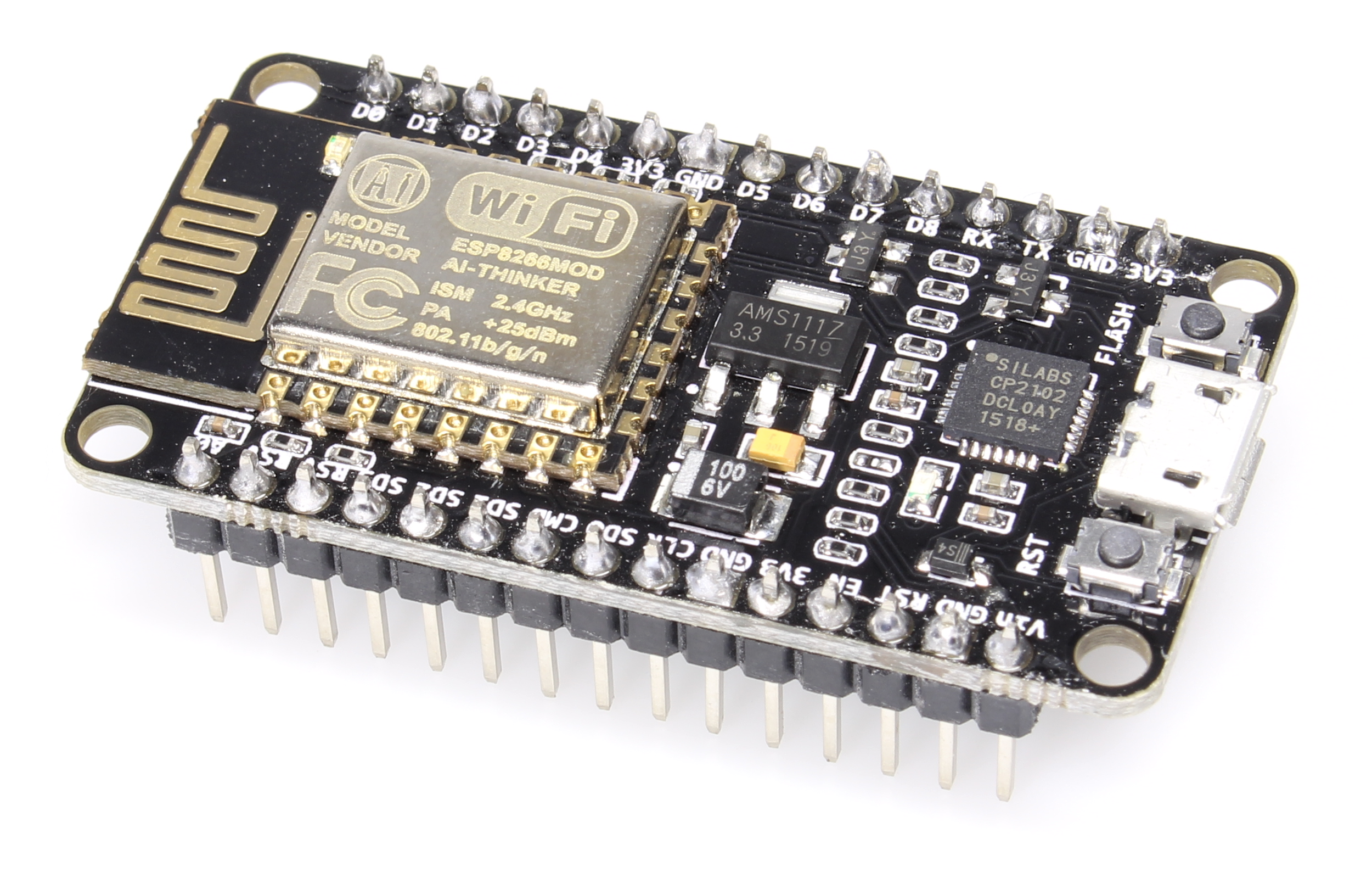
-
Espressif ESP8266 (NodeMCU), ESP32
- 32bit Wi-Fi Controller (Xtensa LX6 oder RISC-V)
-
Raspberry Pi Foundation RP2040
- 32bit ARM Cortex-M0+
-
STMicroelectronics STM32
- 32bit ARM Cortex-M
Mikrocontroller vs SoC vs Einplatinencomputer
💡 Videoerklärung zu Mikrocontroller und SoC
Mikrocontroller
Vorteile:
- Kostengünstig: Microcontroller werden in kostensensitiven Projekte eingesetzt.
- Energieeffizient: Sie verbrauchen wenig Strom, was sie perfekt für batteriebetriebene Anwendungen macht.
- Einfache Integration: Microcontroller sind oft leicht in bestehende Systeme zu integrieren und benötigen nur minimale externe Komponenten.
Nachteile:
- Begrenzte Rechenleistung: Sie haben weniger Rechenleistung und Speicher im Vergleich zu Einplatinencomputern.
- Eingeschränkte Funktionalität: Microcontroller sind für spezifische Aufgaben ausgelegt und bieten weniger Flexibilität für komplexe Anwendungen.
- Weniger Peripherieoptionen: Sie haben oft weniger Schnittstellen und Peripheriegeräte im Vergleich zu Einplatinencomputern.
SoC
System-on-a-Chip
Vorteile:
- Hohe Integration: CPU, GPU, Speicher, und Peripheriegeräte auf einem Chip (kompakte Bauweise).
- Energieeffizienz: Optimierter Stromverbrauch durch Integration und geringere Kommunikationsverluste.
- Leistungsfähigkeit: Häufig leistungsstärker als Mikrocontroller, geeignet für komplexe Anwendungen (z. B. Multimedia, AI).
Nachteile:
- Komplexität: Höhere Anforderungen an Design und Programmierung als bei Mikrocontrollern.
- Kosten: Teurer als Mikrocontroller, insbesondere bei kleinen Projekten oder niedrigen Stückzahlen.
- Reparatur/Austausch: Fehlfunktion einzelner Komponenten kann den Austausch des gesamten Chips erfordern.
Einplatinencomputer
Vorteile:
- Hohe Rechenleistung: Einplatinencomputer wie der Raspberry Pi bieten deutlich mehr Rechenleistung und Speicher.
- Vielseitigkeit: Sie können eine Vielzahl von Betriebssystemen ausführen und sind für komplexe Anwendungen geeignet.
- Erweiterbarkeit: Einplatinencomputer bieten zahlreiche Schnittstellen und Peripheriegeräte, was sie sehr flexibel macht.
Nachteile:
- Höherer Stromverbrauch: Sie verbrauchen mehr Strom als Microcontroller, was sie weniger geeignet für batteriebetriebene Anwendungen macht.
- Kosten: Einplatinencomputer sind in der Regel teurer als Microcontroller.
- Komplexität: Die Einrichtung und Programmierung kann komplexer sein, was eine steilere Lernkurve bedeutet.
Für Mikrocontroller häufig verwendete Programmiersprachen
- C, C++ (Arduino Sketches)
- Rust
- MicroPython
❓❗💬 Erklären Sie, welche Eigenschaften, Vor-/Nachteile und Einsatzzwecke die verschiedenen Programmiersprachen haben.
Arduino
Programmer und IDEs für Arduino
pio device list
git clone https://github.com/platformio/platform-espressif8266 ## oder platform-espressif32
cd platform-*/examples/arduino-wifiscan
pio run --target upload -e nodemcuv2 ## für esp8266mod-12-F
pio run --target upload -e esp-wrover-kit ## für esp-WROOM-32
pio device monitor -b 115200
platformio.ini für die ESPs der Schule
💡 Simulator
µC Beispiel Setups
| Board | Arduino-IDE | PIO | MicroPython | Rust |
|---|---|---|---|---|
| arduino.cc | platformio.org platformio.ini | micropython.org @Wokwi | rust-embedded.org @Wokwi | |
xiao-esp32c3 @Wokwi @ESPHome  | Wokwi Template | env:lolin_c3_miniGPIO: blink | Installation, GPIO, WiFi, WebREPL, NeoPixel | GPIO: blink |
| esp32-WROOM-32 Datenblatt @ESPHome | env:esp-wrover-kitGPIO: blink WiFi: scan | Installation | GPIO: blink | |
| esp8266mod-12-F @ESPHome | env:nodemcuv2GPIO: blink WiFi: scan |
Hello World
print("Hallo Welt")
Hello Blink
from machine import Pin
from time import sleep_ms
led_green = Pin(13, Pin.OUT)
while True:
led_green.value(1)
sleep_ms(500)
led_green.value(0)
sleep_ms(500)
Hello 8Leds
## Pinout: https://cdn.shopify.com/s/files/1/1509/1638/files/ESP_-_32_NodeMCU_Developmentboard_Datenblatt_AZ-Delivery_Vertriebs_GmbH_10f68f6c-a9bb-49c6-a825-07979441739f.pdf?v=1598356497
from machine import Pin
from time import sleep_ms
led_pins = [33, 25, 26, 27, 12, 13, 9, 10]
leds = [Pin(p, Pin.OUT) for p in led_pins]
while True:
for value in [0, 1]:
for led in leds:
led.value(value)
sleep_ms(100)
Hello NeoPixel
from machine import Pin
from neopixel import NeoPixel
pixels_count = 32
pixels = NeoPixel(Pin(15), pixels_count)
pixels[0] = (255, 0, 0)
pixels.write()
Aufgaben
- Verstehen Sie das Beispiel um eine LED in MicroPython blinken zu lassen.
- Bauen und programmieren Sie eine kleine Ampel-Schaltung.
- Versuchen Sie dieses Beispiel zum Ansteuern von NeoPixel-LEDs mit MicroPython zu verstehen.
- Wenn für das Verständnis des Programmes nötig, vereinfachen Sie den Code.
- Spielen Sie mit dem Beispiel-Code herum und versuchen Sie neue schöne Effekte anzuzeigen.
Rust
Dokumentation Rust auf dem ESP32
Künstliche Intelligenz
- Einführung
- Wofür/Wie kann ich KI einsetzen?
- Technische Grundlagen
- Wie funktioniert maschinelles Lernen?
- Sprachmodelle
- Rechtliches
- Ausblick / Zukunft (?)
Vortrag von Klaus Knopper: „Chancen + Risiken generativer KI in Unterricht + Prüfungen“
Einführung
- Deep Fake Beispiele:
Wofür/Wie kann ich KI einsetzen?
-
Beispiele (Sprachmodelle):
-
Lokal:
Wo sind derzeit die Grenzen? Was sollte man beachten?
- Code Generierung (z.B. Copilot)
- Datenschutz, Bias, Manipulation (z.B. DeepSeek)
Beispiel IHK-AP1 2025 „KI zur Rechtsberatung“???

Technische Grundlagen
Begriffe die man kennen sollte:
Was ist „KI“
- Weak artificial intelligence (weak AI) = Artificial Narrow Intelligence
- strong AI:
- Artificial super intelligence (ASI)
- Artificial general intelligence (AGI)
Unterschied zwischen „Programmieren“ und „Machine Learning“
Training und Inferenz
Netz(architektur/struktur) vs. Modell
- Daten
- Gewichte
Wie funktioniert maschinelles Lernen?

Sprachmodelle
SOL Sprachmodelle
SOL:
https://media.ccc.de/v/ds23-194-chatgpt-dialogeFragen:
- Wie funktionieren Sprachmodelle (ganz grob)
- Was können Sprachmodelle aktuell?
- Was können Sprachmodelle (aktuell noch) nicht?
Zusatzaufgabe:
- Führt einen Dialog mit einem Sprachmodell, in dem ihr zeigt, wo die Grenzen der KI sind.
- Welche Fragen zum Thema KI habt ihr?
Retrieval-augmented generation (RAG)
Vortrag + Material von Michael Christen: „Open Data/Freie Daten in KI Chatbots nutzen“ https://github.com/Orbiter/llm-rag-cheat-sheet
Rechtliches
Ausblick / Zukunft (?)
Turing-Test

Spiegeltest
- Cognitive test
- Beispiel: Claude Opus
Dokumentation und Wissensmanagement
- Arten, Nutzer und Ziele von Dokumentation
- Wie ist/wird Wissen strukturiert?
- Datenformate
- Beispiele für Kollaboration
- Open Educational Resources (OER)
- Regeln
Arten, Nutzer und Ziele von Dokumentation
❓❗ Welche Arten von Dokumentation kennen Sie?
An welche Nutzergruppe richtet sich die jeweilige Dokumentation?
flowchart TB Dokumentation --> Kundendokumentation Dokumentation --> TD[Technische Dokumentation] TD --> kollegen[für Kollegen] TD --> selbst[für sich selbst]
❓💬 Was sollte beim Erstellen von Dokumentation beachtet werden?
Wie ist/wird Wissen strukturiert?
❓💡 Welche Datenstrukturen sind geeignet, um Wissen zu repräsentieren?
=> es gibt veschiedene Möglichkeiten:
Linear
z.B.
- Powerpoint-Slides
- Video
Verzeichnisbaum / Ordnerstruktur

Mindmap

Nervenzellen (Neuron), Synapsen, …:

Graph
Definition: „Ein Graph
Gist ein Paar(V,E), wobei
Veine Menge von Knoten (englisch vertex/vertices, oft auch Ecken genannt) undEeine Menge von Kanten (englisch edge/edges) bezeichnet.“
Im Bezug auf Wissensverabeitung können mit Knoten „Konzepte“ (Begriffe, Ideen) dargestellt werden und mit Kanten die zwischen den jeweiligen Konzepten existierenden „Verknüpfungen“ (Beziehungen, Relationen, Assoziationen).

Aktueller Stand der Forschung:
- Das Menschliche Gehirn „speichert“ Wissen als HyperGraph
- Die „geordnete Darstellungen einer Menge von Begriffen und der zwischen ihnen bestehenden Beziehungen“ wird in der Informatik als „Ontologie“ bezeichnet.
- Das Semantic Web versucht ein maschinenlesbares World Wide Web aufzubauen


Datenformate
❓❗ Erklären Sie den Unterschied, zwischen Menschen- und Maschinenlesbaren Datenformaten.
❓💡 Welche Datenformate sind gleichermaßen für Menschen und Maschinen lesbar?
Form follows function
- Sachebene
- Inhalt
- Struktur
- Layout
- Schriftart, Schriftgröße, …
Welche Vorteile ergeben sich, wenn Inhalte für Menschen und Maschinen lesbar sind?
Beispiel: Automatische Übersetzung von LaTeX-Dokumenten
Ausblick: „Why AI-Models Love Markdown“
Empfehlung: Markdown
=> ist das für technische Dokumentation verbreitetste Format

Beispiele für Kollaboration
-
Wiki:
-
von Mitschülern:
Open Educational Resources (OER)
=> Einführung in Markdown, Werkzeuge und Übersicht über frei nutzbare Lernmaterialien
Regeln
Gesetze
=> bitte beim veröffentlichen von Inhalten beachten:
Docker
OCI-Container: Docker / Podman
❓💬 Welche Plattformen und Container-Arten kennen Sie?
❓💬 Wofür sind Container nützlich?
Installation
Dockerfile
docker-compose
Beispiele
SQL
- Grundlagen
- Normalisierung
- Quick Reference
- SQL Injections
Grundlagen
NoSQL (Not only SQL)
ACID
- Atomicity
- Consistency
- Isolation
- Durability
CAP theorem
- Consistency
- Availability
- Partition tolerance
Normalisierung
Ziel: Konsistenzerhöhung durch Redundanzvermeidung
Erste Normalform (1NF)
Jedes Attribut der Relation muss einen atomaren Wertebereich haben, und die Relation muss frei von Wiederholungsgruppen sein
Lösung: atomare Attributwertebereiche
- Felder (Spalten) mit zusammengesetzten Typen aufspalten -> atomaren Wertebereich
- -> Aus Datenbankeinträgen mit Listen (Wiederholungsgruppen) können mehrere Einträge werden
Zweite Normalform (2NF)
Nichtschlüsselattribute müssen von allen Schlüsseln vollständig abhängen
Lösung: Tabellen aufteilen
Dritte Normalform (3NF)
Keine funktionalen Abhängigkeiten der Nichtschlüssel-Attribute untereinander (transitive Abhängigkeiten)
Lösung: Tabellen weiter aufteilen
Quick Reference
CREATE TABLE
CREATE TABLE table_name
(
column_name1 data_type,
column_name2 data_type,
column_name3 data_type,
)
INDEX
GRANT / REVOKE
GRANT
privileges
ON object
TO role_specification
- privilegeds: SELECT | INSERT | UPDATE | … | ALL PRIVILEGES
- objects: db_name | table_name | …
- role_specification: user | group | …
INSERT INTO
INSERT INTO table_name
(column1, column2, column3,...)
VALUES (value1, value2, value3,....)
UPDATE
UPDATE table_name
SET column1=value, column2=value,...
WHERE some_column=some_value
SELECT + WHERE
SELECT column_names
FROM table_name
WHERE column_name operator value
SQL Operators
Logical Operators
- AND, OR, NOT
- ANY, SOME, IN, ALL
Comparison Operators
- =, >, <, >=, <=, <>
Arithmetic Operators
- +, -, *, /, %
Date/Time-Functions
z.B.
NOW()
SELECT + WHERE + LIKE
SELECT column_names
FROM table_name
WHERE column_name LIKE pattern
Wildcards
| Wildcard | Bedeutung |
|---|---|
| % | Ein oder mehrere beliebige Zeichen |
| _ | Ein einzelnes Zeichen |
| weitere |
SELECT + DISTINCT + LIMIT
SELECT (DISTINCT) column_names
FROM table_name
WHERE conditions
(LIMIT n)
SELECT + ORDER BY
SELECT column_names
FROM table_name
WHERE column_name operator value
ORDER BY column1, column2, ... ASC|DESC;
SELECT + GROUP BY (+ HAVING)
SELECT column_names, aggregate_function(column_name)
FROM table_name
WHERE column_name operator value
GROUP BY column_name
(HAVING condition)
Aggregate Functions
MIN(), MAX(), COUNT(), SUM(), AVG()
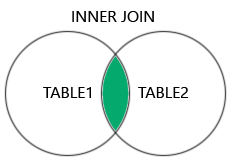
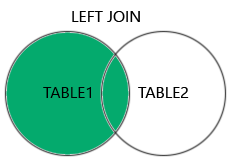
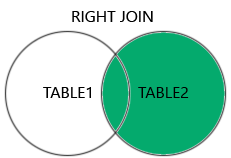
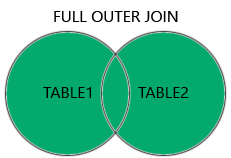
JOIN
SELECT column_name(s)
FROM table_name1
INNER JOIN table_name2
ON table_name1.column_name=table_name2.column_name